IRAFSTECH Team Introduction
IRAFSTECH - Intelligent Robotics And Advanced Fluid Systems Lab is a multidisciplinary cross-college academic institution built on international cooperation. This lab is supported by the School of Mechatronics Engineering at Harbin Engineering University and the Schools of Engineering and Electrical Engineering at Aalto University (formerly Helsinki University of Technology) as an open academic platform. Harbin Engineering University is a key university of China's "Project 211". The discipline of Mechanical Manufacturing Engineering has the authority to grant doctoral degrees and is one of the key disciplines at Harbin Engineering University. It houses the Heilongjiang Modern Manufacturing Engineering Technology Research Center. The lab has over 200 square meters of high-end server and hydro-liquid test benches, mobile robot testing grounds and other experimental and testing infrastructure. The lab has 8 teachers with senior professional titles and doctoral degrees, over 20 doctoral students, and over 50 master's students, making up an energetic and aspiring young team.
Xu He, Bachelor's degree from Zhejiang University, Master's and Ph.D. degrees from Harbin Institute of Technology. Senior Research Scholar of CSC at AIRLab, Politecnico di Milano, Italy. Chinese director of the HEU-AirLab Joint Lab. Team members all have work experience in enterprises and research institutes.
The team has completed over 40 projects including Metro Line 2&3 South/West Depots in Tehran, Beijing Metro Line 8, National Torch Program, robotized high-speed train test bench, eye movement disorder decision support system, space robotic arm simulation system, robotic intelligent operation and maintenance system, and marine platform control valve industrialization engineering. Has undertaken national 863 program, National Natural Science Foundation of China, doctoral program funds of the Ministry of Education, provincial natural science funds, Harbin innovation talents funds, enterprise R&D funds, university-enterprise cooperation funds, etc. Has won Siemens Application Competition Award, 2nd and 3rd Prize of Heilongjiang Provincial Science and Technology Progress, Outstanding Master's Thesis Advisor of the 7th Heilongjiang Province, and trained 3 doctoral students who won CSC Scholarships. Won 1st Prize and Outstanding Instructor Award in the 4th and 8th National Postgraduate Petroleum Equipment Innovation Competitions. Published 5 monographs and textbooks, authorized over 80 invention patents and software copyrights, and formulated 1 enterprise standard. Has published over 80 articles in SCI/EI journals such as EAAI (CAS), BDM (Q1 bionics), Robotics, and top international conferences including IEEE-ICRA 2020, 2023 (No.1 robotics) and BATH/ASME FPMC (No.1 fluid power). Associate Editor of New Industrialization; Vice Chairman of 1st Heilongjiang Eye Movement Rehabilitation Committee; Director of Harbin Aeronautics Society; IEEE member; Senior member of CCF and CSAA; Expert for international cooperation programs, Torch Program, NSFC, SME Technology Innovation Fund, doctoral program funds of the Ministry of Education, Heilongjiang Provincial S&T Funds; Evaluation expert for enterprise IPO and restructuring; Expert for major industrialization projects of Shaanxi SME Board Incubation Innovation Fund. Partner initiator of study abroad & international student entrepreneurship projects of Heilongjiang colleges and universities. Key member of national standard drafting team for underwater soft robot testing.
Research Areas:Advanced Fluid Systems, Intelligent Robotics
1) Applications of bionics and AI, AR in intelligent manufacturing;
2) Intelligent design and manufacturing of advanced fluid systems, data mining and process detection;
3) Robotization and IoT of inspection and maintenance production lines;
4) Integration and multi-field coupling optimization of biological weak signal processing devices;
5) Fluid bionic applications in multiphase fluid mixing actuators and operation systems;
6) Hybrid soft robots and underwater soft operation systems;
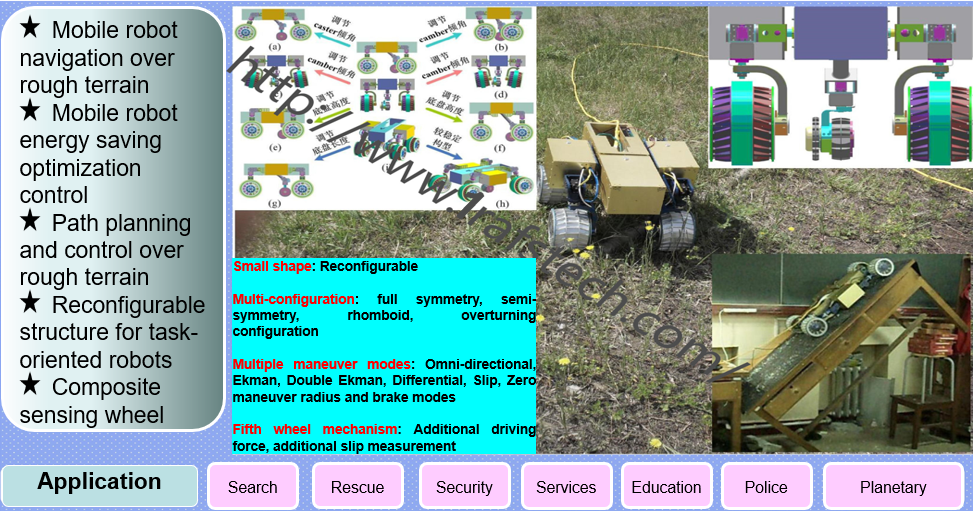
7) Inclusive bionic special robots for extreme environments;
8) Advanced fluid transmission and intelligent servo control systems.
Project contribution:
1. Research on Low Energy Consumption Traversal Methods of Robots on Rugged Terrain (National Natural Science Foundation)
2. Application and Industrialization of Bionic Technology in Control Valves

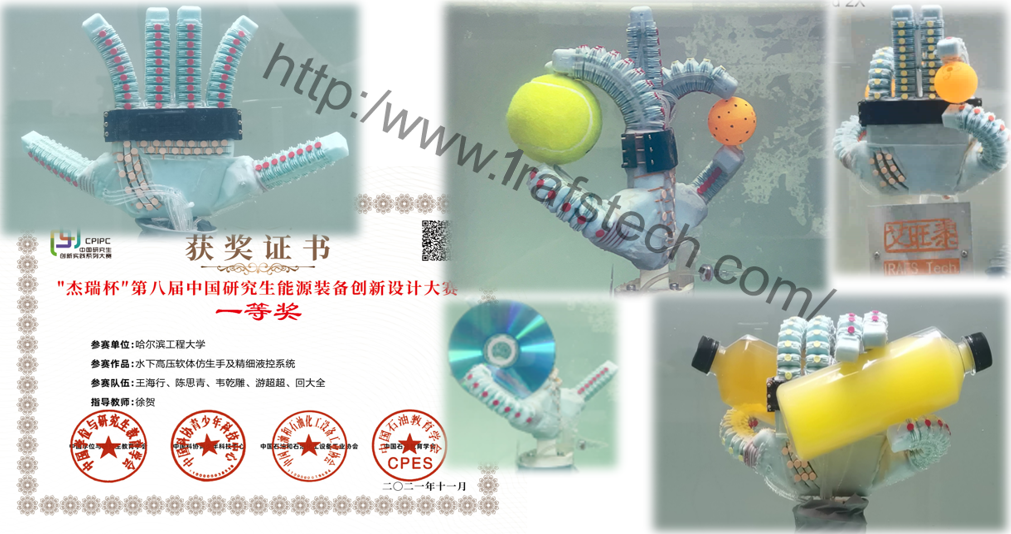
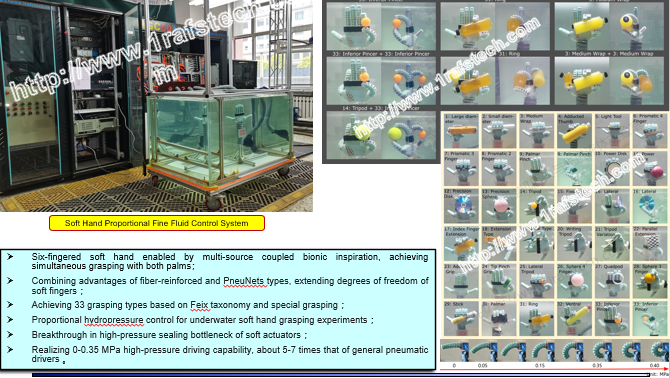
3. Underwater High-Pressure Soft Bionic Hand and Precise Fluid Control System
4. AI and AR Applications for Robotic Automated Equipment and Maintenance Line Equipment

5. 3D Environmental Perception Robot

6. Visual Pollution Emergency Response Planning of Autonomous Robots Based on Biomimetic and Metacognitive CBR (NSFC)

7. Hydropressure-Driven Underwater High-Pressure Soft Bionic Hand Flexible Grasping
8. Underwater soft-grid hybrid variable diameter belt driven robotic arm with load carrying capacity

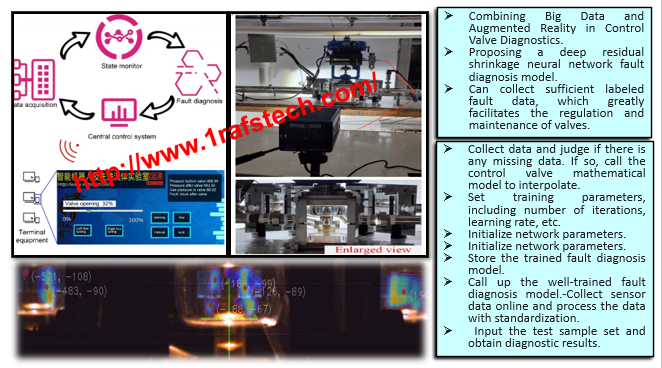
9. Application of Big Data and Augmented Reality in regular Valve Diagnostics
10. AR-based valve maintenance system
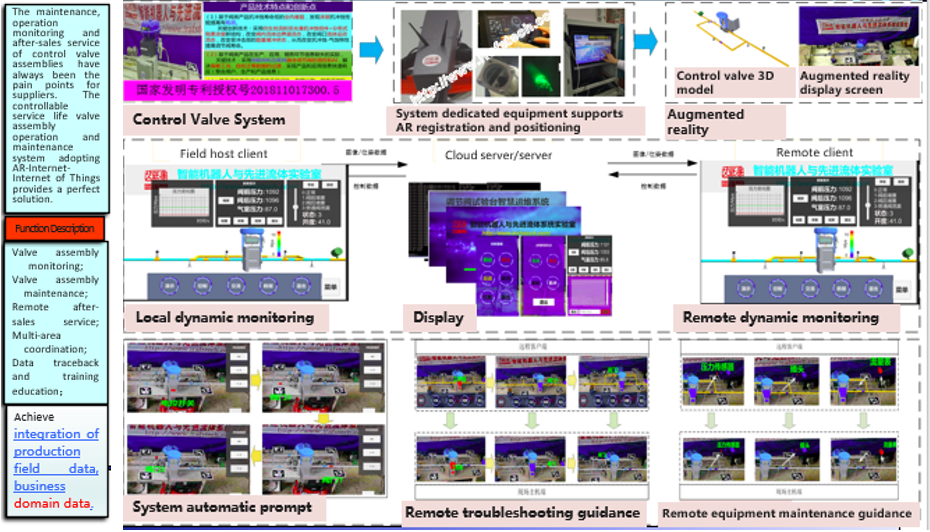
11. Mobile AR+AI After-sales Training

Paper contribution:
(1) Wang H, Xu H*, Gao X Z , et al. Arrangement optimization of a novel three dimensional multiphase flow imaging device employing modified harmony search algorithm. Engineering Applications of Artificial Intelligence, 2021, 100(16):104185. (SCI,CASR Q1top, JCR Q1,IF=7.802)
(2) Sun F, Xu H*. Meng Y H, Lu Z M, Gong C J, BERT-based coupling evaluation of biological strategies in bio-inspired design, Expert Systems with Applications, 2023: 119725.(SCI,CASR Q1top, JCR Q1, IF= 8.665)
(3) Sun F, Xu H*. Meng Y H, Lu Z M, Chen S Q; Wei Q D; Bai C Y; BERT and Pareto dominance applied to biological strategy decision for bio-inspired design, Advanced Engineering Informatics,2023, 55: 101904.(SCI,CASR Q1 top, JCR Q1,IF= 7.862)
(4) Sun, F., Xu, H*., Cheng, M., Wang, Y., Zhang, S., Zhang, X., & Ma, N. (2021). Sensitive Monitoring Particles Conveying in Water Hydraulic System via a Facile Molding Conductive Hydrogel. IEEE Sensors Journal, 21(9), 10506-10513. ( SCI, CASR Q2top, JCR Q1, IF:4.325).
(5) Wang H, Xu H*, Abu-Dakka F J, et al. A Bidirectional Soft Biomimetic Hand Driven by Water Hydraulic for Dexterous Underwater Grasping. IEEE Robotics and Automation Letters, 2022, 7(2): 2186-2193. (SCI, CASR Q2,JCR Q2,IF=4.321)
(6) Sun F, Xu H*. A review of biomimetic research for erosion wear resistance. Bio-Design and Manufacturing, 2020, 3(4): 331-347. (SCI, CASR Q2,JCR Q2,IF= 6.759)
(7) Yihan Meng, He Xu*,Zhen Ma,Jiaqiang Zhou,Daquan Hui. Detail-semantic guide network based on spatial attention for surface defect detection with fewer samples. APPLIED INTELLIGENCE. 2022, 1-19. ( SCI, CASR Q2, JCR Q2, IF:5.019)
(8) Sun F, Xu H*, Meng Y, et al. A BERT-based model for coupled biological strategies in biomimetic design[J]. Neural Computing and Applications, 2022: 1-17. (SCI, CASR Q3, JCR Q2, IF=5.102)
(9) Wei Q, Xu H*, Sun F, et al. Biomimetic fiber reinforced dual-mode actuator for soft robots. Sensors and Actuators A: Physical, 2022, 344: 113761. (SCI,CASR Q3,JCR Q1,IF= 4.291)
(10) Chen S, Xu H*, et al. A Pneumatic-Hydraulic Hybrid actuator for Underwater Soft Robot Swimming and Crawling. Sensors and Actuators A: Physical, 2023. (SCI, CASR Q3,JCR Q1,IF= 4.291)
(11) Wang H H; Xu He*, Meng Y H; Deep Learning-Based 3D Pose Reconstruction of an Underwater Soft Robotic Hand and Its Biomimetic Evaluation, IEEE Robotics and Automation Letters, 2022, 7(4). (SCI, CASR 2, JCR Q2,IF=4.321)
(12) Wang H, Abu-Dakka F J, Le T N, Ville K, Xu H. A Novel Soft Robotic Hand Design With Human-Inspired Soft Palm: Achieving a Great Diversity of Grasps. IEEE Robotics & Automation Magazine, 2021, 28(2): 37-49. (SCI, CASR Q2,JCR Q2,IF=5.229)
(13) Chen S Q, Xu H*, Zhao Z T. Modeling and optimization of novel ball valve with high adjustable ratio. International Journal of Pressure Vessels and Piping, 2021, 190. (SCI,CASR Q3,JCR Q2,IF=2.665)
(14) Wang H, Xu H*, Zhang Y, et al. Design of a Bio-Inspired Anti-Erosion Structure for a Water Hydraulic Valve Core: An Experimental Study. Biomimetics (Basel), 2019, 4(3). (SCI,CASR Q3,JCR Q3,IF=3.877)
(15) Sun F, Xu H*, Zhao Y-H, et al. Data-driven fault diagnosis of the control valve with missing data, based on modeling and deep residual shrinkage network. Journal of Zhejiang University SCIENCE A, 1998, -1(-1). (SCI,CASR Q3,JCR Q2,IF=2.485)
(16) Yang C, Xu H*, Li X, et al. Kinematic modeling and solution of rigid-flexible and variable-diameter underwater continuous manipulator with load. Robotica, 2021: 1-16. (SCI, CASR Q3, JCR Q4,IF=2.406)
(17) Wang H, Xu H*, Yu F, et al. Modeling and Experiments on the Swallowing and Disgorging Characteristics of an Underwater Continuum Manipulator. 2020 IEEE International Conference on Robotics and Automation (ICRA), 2020. (EI, top conference in robotics)
(18) Chen S, Xu H*, Xiong X. An underwater jet-propulsion soft robot with high flexibility driven by water hydraulics. 2023 IEEE International Conference on Robotics and Automation (ICRA),2023. (EI, top conference in robotics)
(19) Weiwang Fan, He Xu*, Haihang Wang, Siqing Chen, Qiandiao Wei, Chaochao You. Multi-DoF Soft Robotic Actuators Based on Spring Reinforce and Particle Jamming[C] . 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). (EI, top conference in robotics)
(20) Wei Q D, Xu H*, Chen S Q. Addressing Pressure Control Based on Pressure Wave and Band-Pass Valve. ASME/BATH 2021 Symposium on Fluid Power and Motion Control (FPMC2021), 2021. (EI, top conference in fluid field)
(21) Yang C, Xu H*, Li X, et al. Underwater Flexible Manipulator Double-Loop Feedback Control Based on Built-in Binocular Vision and Displacement Sensor. BATH/ASME 2020 Symposium on Fluid Power and Motion Control (FPMC2020), 2020. (EI, top conference in fluid field)
(22) Li X, Xu H*, Yang C, et al. Study on an Underwater Flexible Manipulator Based on Hydraulic Drive. BATH/ASME 2020 Symposium on Fluid Power and Motion Control (FPMC2020), 2020. (EI, top conference in fluid field)
(23) Chen S Q, Xu H*. Modeling, Analysis, and Function Extension of the Mckibben Hydraulic Artificial Muscles. BATH/ASME 2020 Symposium on Fluid Power and Motion Control (FPMC2020), 2021. (EI, top conference in fluid field)
(24) Chen S Q, Xu H*, Zhou X S. Bionic Water Hydraulic System of Soft Robot Control Inspired by Spider Limbs. 2021 IEEE International Conference on Robotics and Biomimetics (ROBIO), 2021. (EI)
(25) Chen S Q, Xu H*, Wei Q D, et al. Modeling, Analysis, and Experimental Results of the Skeleton-Embedded Fiber-Guided Water Hydraulic Actuator. 2021 IEEE International Conference on Robotics and Biomimetics (ROBIO), 2021. (EI)
(26) Ma Z, Xu H*. A Kinematic-Based Unmarked Augmented Reality Method for Large Scene Industrial Workshops. ASME 2020 International Mechanical Engineering Congress and Exposition, 2020.(EI, top conference in mechanical engineering)
(27) Zhou J Q, Xu H*, Ma Z, Meng Y H, HUI D Q. Sparse Point Cloud Generation Based on Turntable 2D Lidar and Point Cloud Assembly in Augmented Reality Environment; proceedings of the IEEE International Instrumentation and Measurement Technology Conference (I2MTC), F May 17-20, 2021. (EI)
(28) Zhou J Q, Xu H*, Zhao Z, Ji X F. Omnidirectional and Variable Density Point Cloud Acquisition Based on Turntable Solid-state LiDAR; proceedings of the 2nd IEEE International Conference on Data Science and Computer Application, ICDSCA 2022, October 28, 2022 - October 30, 2022, Dalian, China, F, 2022. (EI)
Patent contribution
(1) Xu He, Lu Changliang, Sun Feng. A synthetic cleaning device for mobile robot camera vision field based on bionic momentary membrane. ZL 2020 1 1177189.3, 2021.12.3.
(2) Xu He, Ma Zhen, Jin Jintian, Chang Yizhe, Zhao Zhuowen. A remote applicable large scene industrial site unmarked augmented reality assisted manufacturing and maintenance system. 202210099733.X, 2022.01.27.
(3) Xu He, Zhou Xueshan, Chen Siqing, Ma Zhen. A water pressure flexible arm driving and control system based on hydraulic half bridge. ZL2020 1 1174243.9, 2020.10.25.
(4) Xu He, Zhao Zitong, Wang Haixing, Jiao Liye. A valve with composite coating and non-smooth space disturbance microstructures. ZL 2018 1 1017300.5, 2018.09.01.
(5) Xu He, Ma Zhen, Chen Siqing, Zhao Zitong, Zhou Xueshan. A user reconfigurable modular flexible digital flow control valve structure. ZL 2020 1 1223744.1, 2020.11.05.
Software copyright contribution
(1) Xu He, Wang Haixing. Real-time three-dimensional simulation software system of fluid-driven soft robot hand, 2021SR1179229
(2) Xu He, Wang Haixing. Optimized design software system of soft robot hand based on finite element analysis, 2021SR1179275
(3) Xu He, Wang Haixing, Li Peng. Optimization system of novel three-dimensional high-speed imaging composition based on valve flow state observation, 2018SR812238
(4) Xu He, Wang Haixing, Li Peng. Flexible arm measurement software based on novel three-dimensional high-speed imaging, 2018SR812232
(5) Xu He, Chen Siqing, Wei Qiandiao, Fan Weiwang. Underwater hydraulic valve control feedback system, 2021SR0795630.
(6) Xu He, Yang Chen, Li Xin, Chen Siqing. Control system for cooperative operation of large and small flexible arms, 2021SR1318723.
(7) Xu He, Yang Chen, Li Xin. Underwater flexible arm workspace calculation software, 2021SR0714154.
(8) Xu He, Li Xin, Yang Chen. Flexible arm target object capture software system, 2021SR1179273.
(9) Xu He, Li Xin, Yang Chen. Serial flexible arm working control software system, 2021SR1179272
(10) Xu He, Zhao Wenda, Li Peng, Zhou Xueshan. Simulation software of hyperelastic model jet mixing driven flexible arm 2018SR012716.
(11) Xu He, Li Peng, Zhou Xueshan. Rigid-flexible hybrid mechanical upper arm drive control software, 2018SR425290.
(12) Xu He, Hui Daquan, Ma Zhen. AR display software system of robot arm posture based on binocular vision, 2021SR1179270.
(13) Xu He, Chi Yuan, Sun Feng, Chen Siqing, Zhang Yonghui, Augmented reality bionic hydraulic valve collaborative design management, 2019SR1138719.
(14) Xu He, Zhao Dongbo. Augmented reality remote maintenance system for regulating valve test bench, 2021SR1179290.
(15) Xu He, Zhao Dongbo. Dual telepresence augmented reality remote maintenance system, 2021SR1179274.
(16) Xu He, Meng Yihan. Real-time measurement and augmented reality display system for simple beam deformation, 2021SR1179271.
Scientific research awards
(1) Wang Haixing, Chen Siqing, Wei Qiandiao, You Chaochao (applicant's instructor). The 8th Jerrry China Postgraduate Oil Equipment Innovation Design Competition, First Prize, 2021.
(2) Yang Chen, Li Xin, Zhao Dongbo, Fan Weiwang (applicant's instructor). The 8th Jerrry China Postgraduate Oil Equipment Innovation Design Competition, Third Prize, 2021.
(3) Xu He. The 8th Jerrry China Postgraduate Oil Equipment Innovation Design Competition, Excellent Instructing Teacher, 2021.
(4) Ma Zhen, Zhou Jiaqiang, Meng Yihan, Hui Daquan, Zhao Dongbo (applicant's instructor). China North Industries Group Corporation 6th Innovation Competition Excellent Award, 2020.







 中文
中文 Search
Search